Эваториальная платформа своими руками

Став обладателем телескопа на монтировки добсона, первое что хотелось улучшить - это конечно ведение. До этого, у меня были телескопы на эваториале с приводами, а к хорошему быстро привыкаешь. Конечно ничего критичного в том, что приходится постоянно передвигать трубу руками - нет, и это вам скажет любой добсоновод, но это не для меня )) И так, какие есть варианты - готовые монтировки с GO-TO. Экваториальные клинья и экваториальная платформа. И тут для меня был основной сюрприз, я до этого думал - что это одно и тоже. Представив, как будет выглядеть добсон 12 на площадке под углом в 38 гр относительно горизонта - понял что это не реально. Поэтому, отбросив идею с экваториальными клиньями, начал придумывать некий аналог гоу ту. Идея была следующая - оснастить монтировки приводами по двум осям. С помощью ардуины управлять движками. На небольших участках перемещения использовать упрощенные алгоритмы расчета угловых скоростей. Закопался бы я в это по самый уши, если бы вовремя меня @roman опять не поставил на путь истинный, за что ему большое спасибо! Как оказалось, экваториальная платформа - это не тоже самое, что экваториальный клин. Её конструкция совершенно другая, наклон конструкции в процессе работы минимальный. Все это выглядело как магия, но когда я понял принцип работы - это был прорыв ))
В интернете много информации, но лучшая и полностью исчерпывающая в теоретическом плане тут http://www.reinervogel.net/index_e.html?/Plattform/Planung_e.html . Для добов до 10 дюймов там есть уже полностью рассчитанные конструкции. Мне же надо было побольше )) Поэтому, вспомнив школьный курс тригонометрии, исчертив несколько листов бумаги, были определенны основные параметры и вид платформы, которая на этом этапе напоминала таинственные знаки масонов ![]()
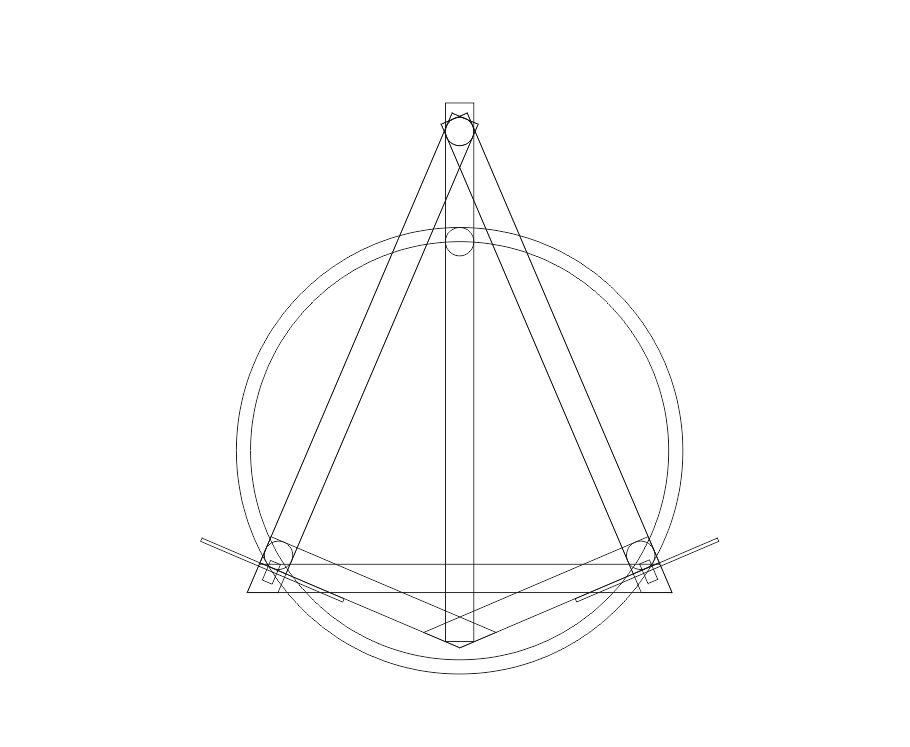
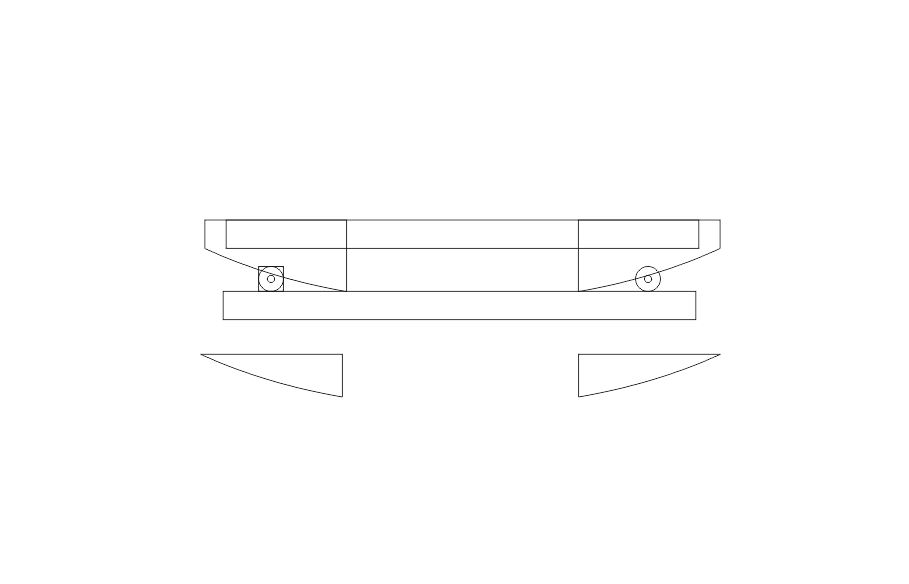
Прототип платформы.
В качестве материала выбрал алюминий, легкий и не боится влаги, в отличии от фанеры.В целом, конструкция вырисовывалась не сильно сложной в реализации, но были элементы (эллиптические сегменты), которые руками точно сделать довольно сложно. Нужен был фрезер с ЧПУ. И тут мне на помощь пришел Олег (mo) с астрофорума. Я на радостях нарисовал в довесок к сегментам еще кучу деталей, которые до этого собирался пилить руками. Олег сам заказал материал на свой адрес, забрал, распустил его не детали и прислал мне уже готовый результат. Хочу выразить ему большую благодарность, за такую отзывчивость и помощь!

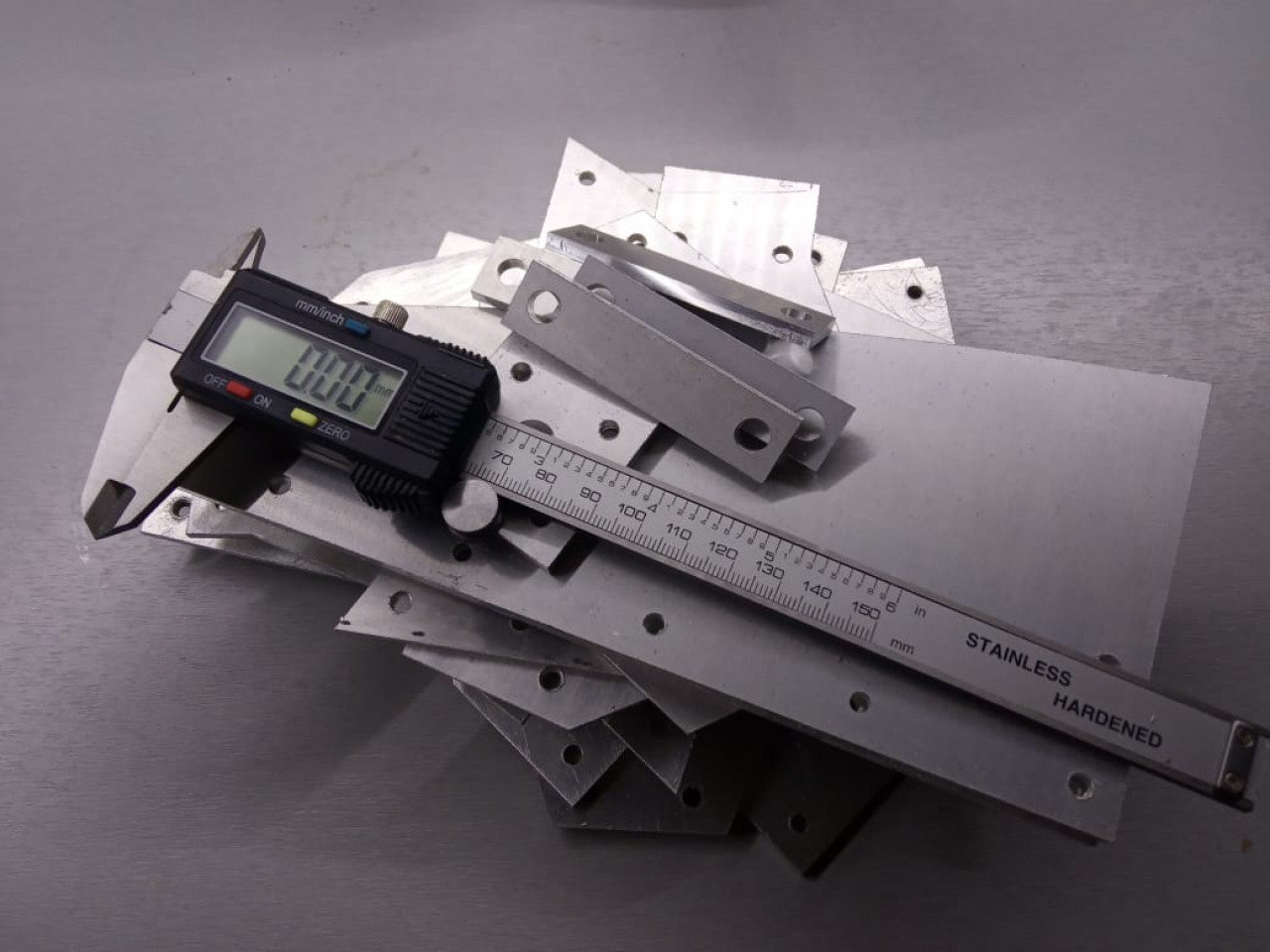
великая сила ЧПУ!
Получив детали, докупаю алюминиевую трубу в строительном магазине, и вооружившись заклепочником со всеми этими железками еду в небольшую мастерскую у друга в подвале. Там в веселой компании за несколько часов мы сотворили это.

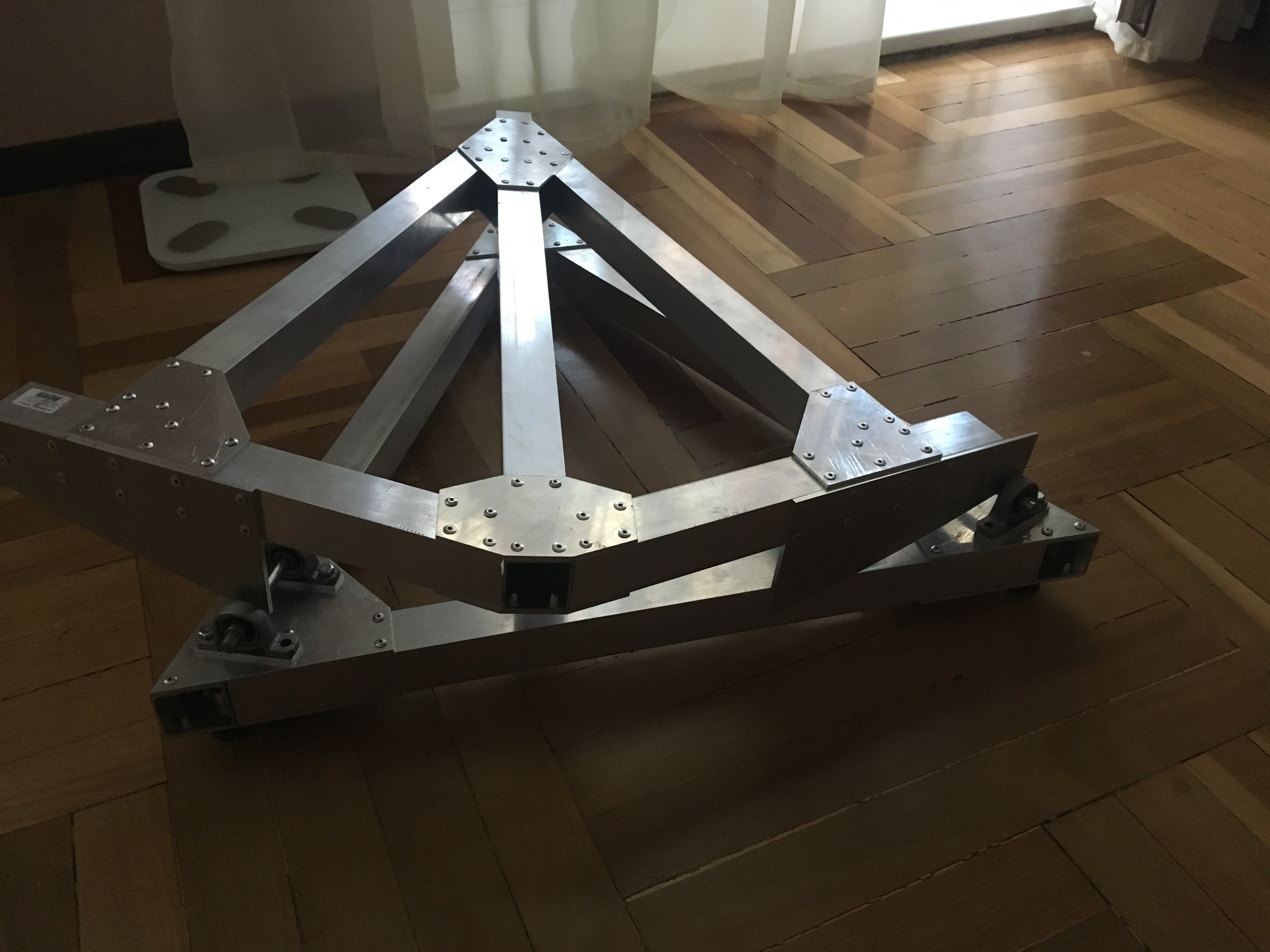
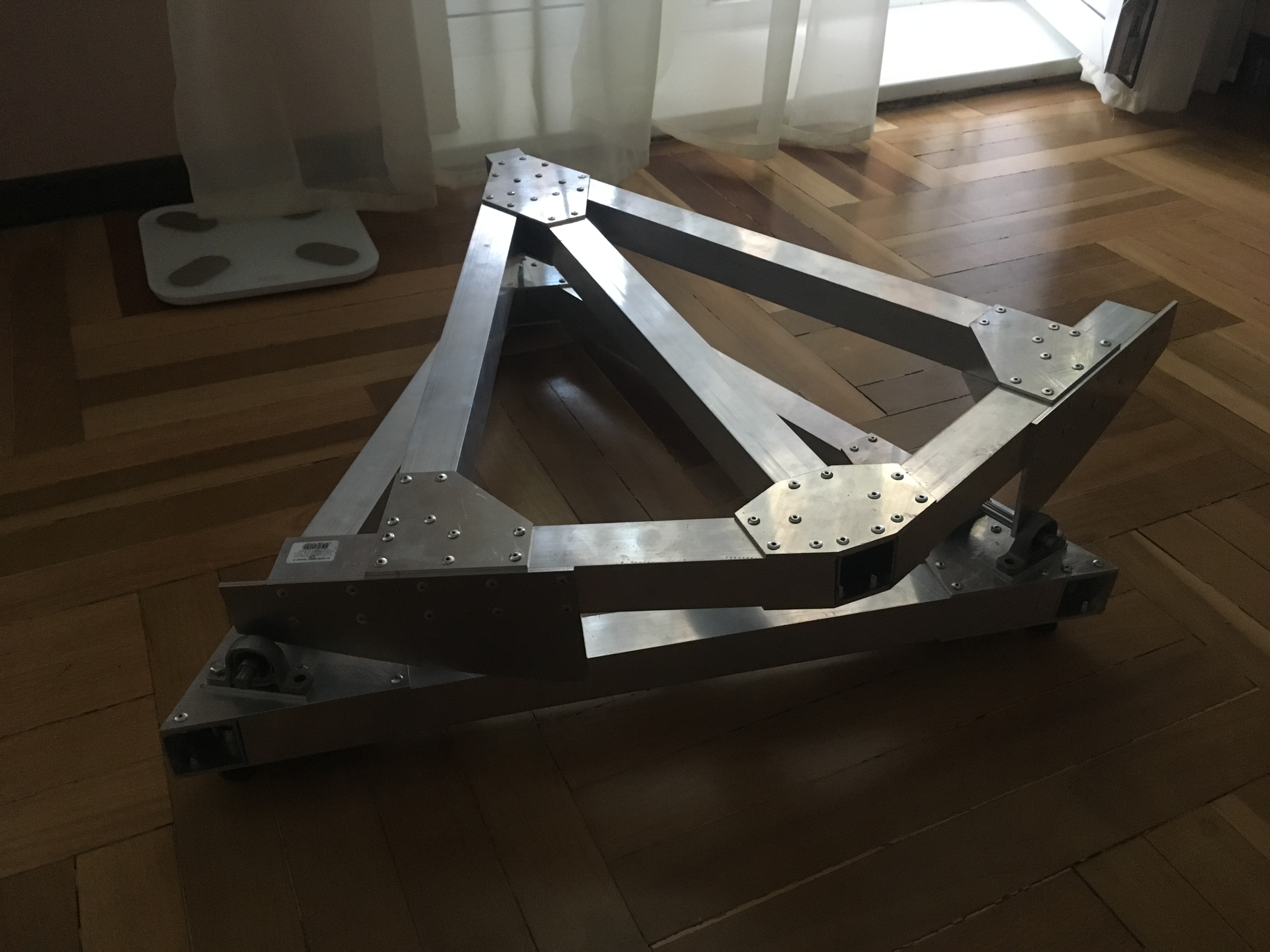
Получилось вполне нарядно с закосом под фабричное производство. Железка готова, но надо ее оживить и заставить двигаться. Благо сейчас с этим проблем нет, ардуино, шаговые двигатели, различные контроллеры, все это можно найти по смешным ценам на Aliexpress. Так как не хотелось никаких пультов и проводов, ПО писалось с возможностью удаленного управления. В качестве модуля управления выбор пал на esp8266, контроллер двигателя drv8825, сам движок - NEMO 17. Для управления двигателем пришлось писать собственную библиотеку, с использованием механизмов прерывания, так как надо было на одном модуле совместить работу WiFi точки доступа и генерацию импульсов для шаговика. Вообще esp8266 - это просто волшебство какое-то)) По сути на одной маленькой платке есть все - и мини веб сервер, и frontend для управления с помощью веб морды. Потратил несколько недель на изучение и написания ПО. По сути всего этого можно было не делать. Цель удаленного управления - это корректировка скорости вращения, но на практике, точности теоретически рассчитанного значения оказалось вполне достаточно для визуальных наблюдений. Но удовольствия от процесса я получил не меньше чем от результата))
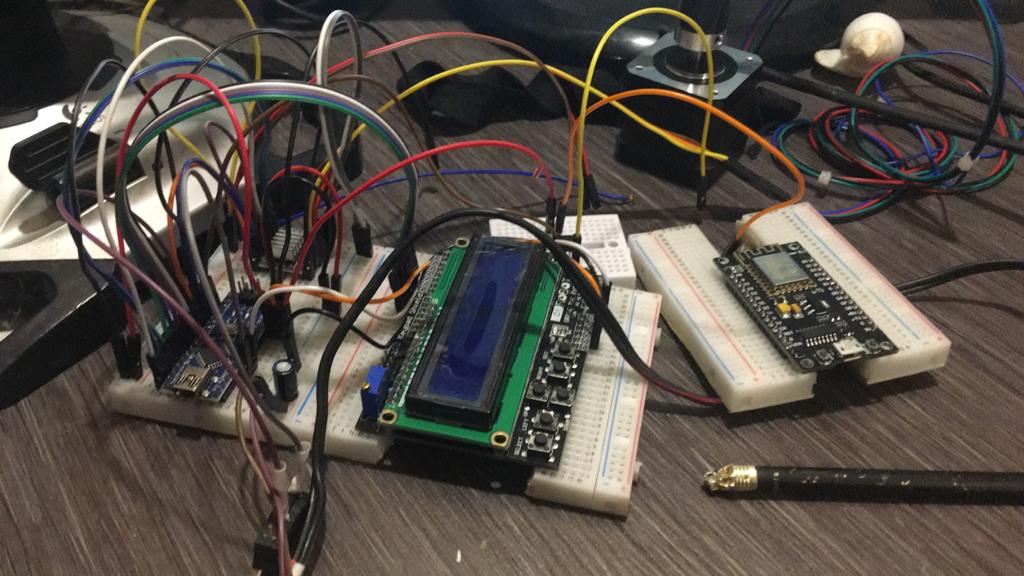
Разработка прототипа
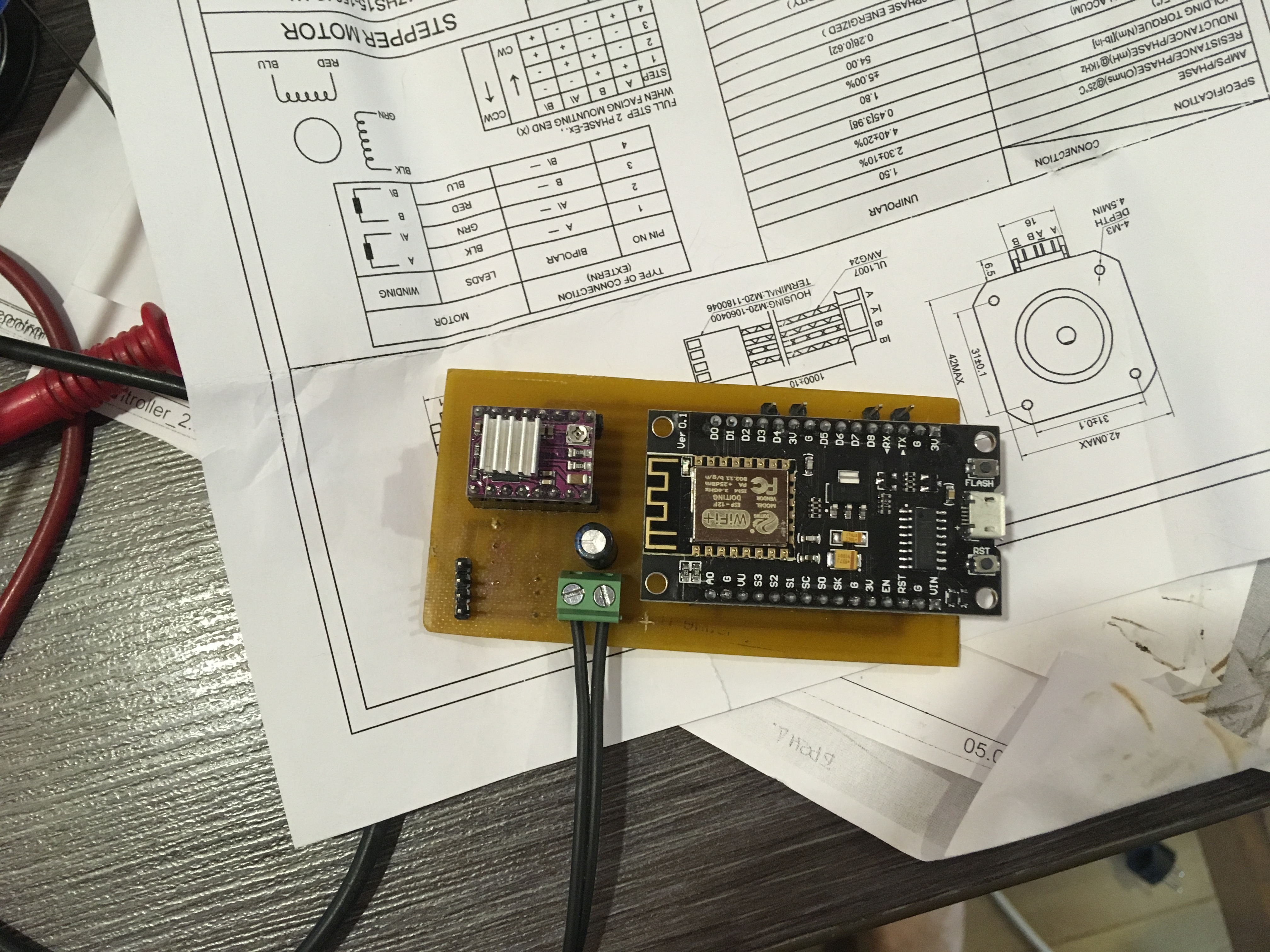
Готовый вариант контроллера

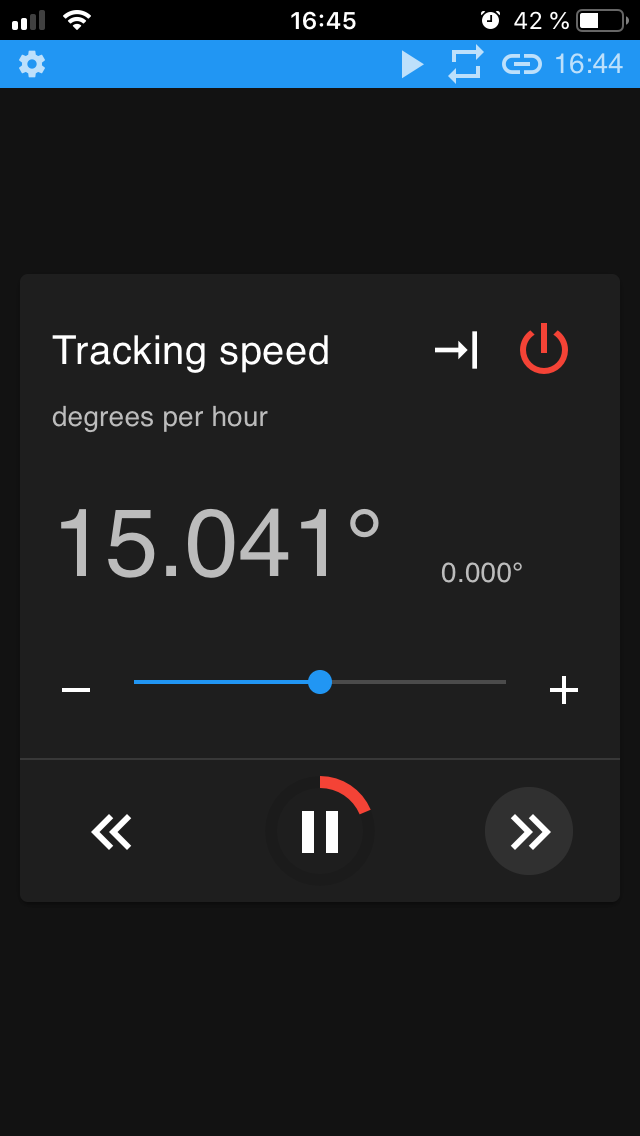
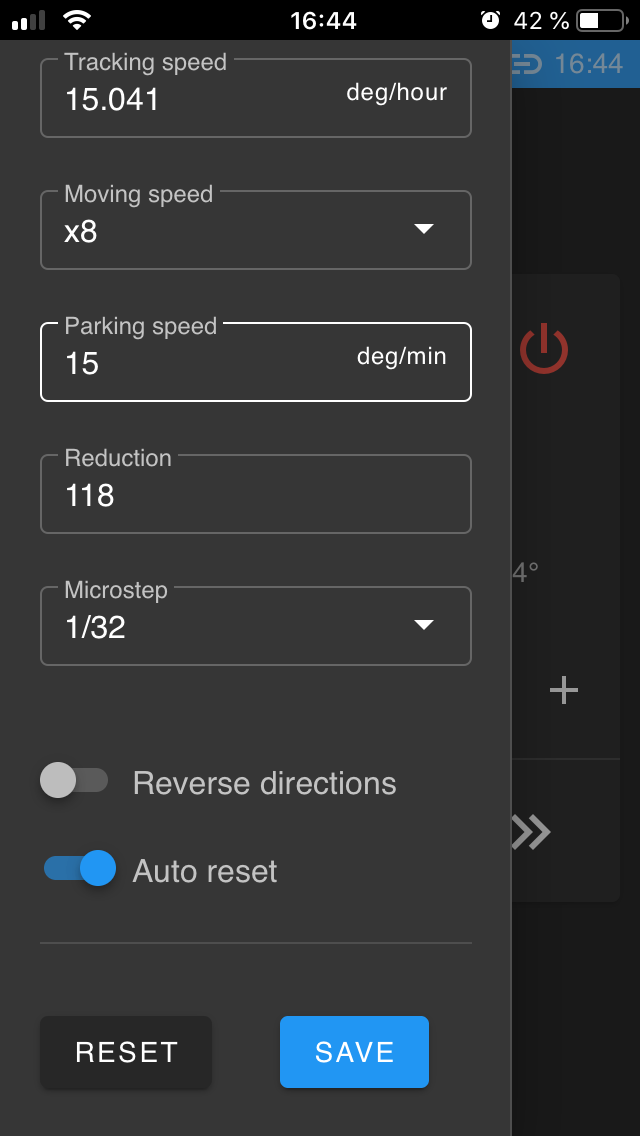
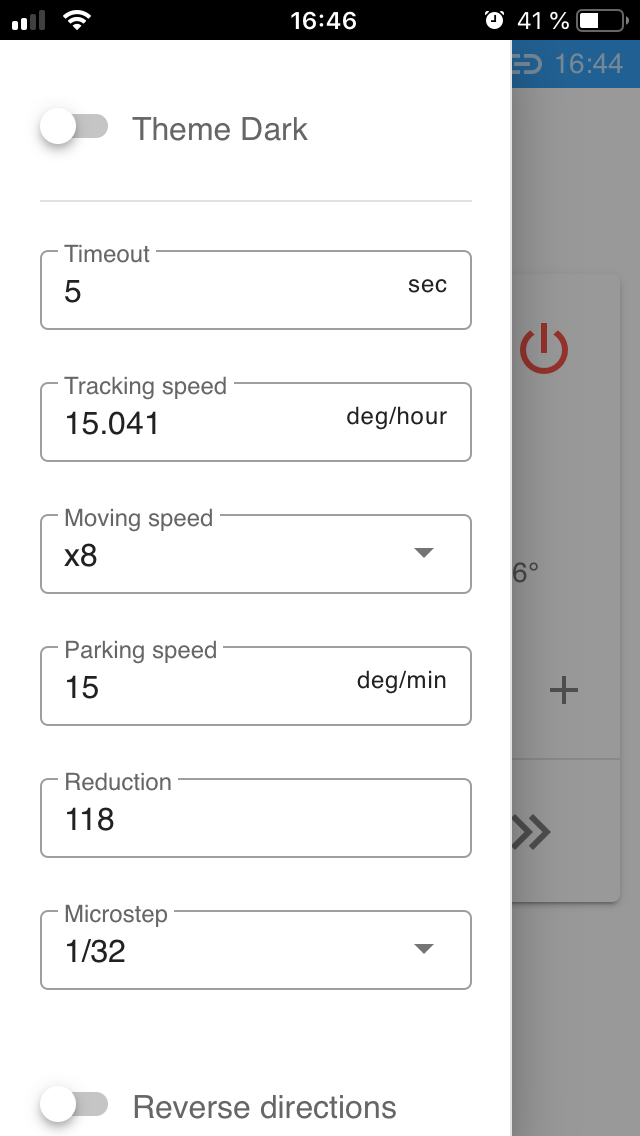
ПО управления платформой
Ну вот наконец то платформа ожила и под писк шагового двигателя начала перемещаться в пространстве.

нижняя часть в сборе
Балконные испытание худо бедно прошли (обзор маленький, толком установить нормально не получилось) Но как она покажет себя в поле.
Долгожданный выезд, и тут меня ждал облом. Во первых, телефон не мог подключиться к платформе (оказалось, что контроллер каким то образом запомнил мою домашнюю сеть и пытался найти ее в поле) Во вторых, изображение перемещалось в поле зрения окуляра, не так быстро, как без платформы, но все же. Первое что пришло в голову, это не точно рассчитанная скорость вращения шаговика, но изменить я ее не могу из за проблем с подключением, а от кнопок я сознательно отказался.
Вернувшись домой, первым делом поправил в прошивке проблему с WiFi. И тут меня осенило, оказывается я платформу поставил задом наперед, направлением на юг, да еще и двигатель наоборот подключил. Что и куда вращалось на том испытание - неизвестно )))
Проведя работу над ошибками, выезжаю на очередное испытание. Хорошенько прицелил платформу, в этот раз на север ![]() Выставил уровень. Ставлю движок на паузу в приложении с телефона, ловлю Луну в окуляр, нажимаю пуск - и картинка замирает!!! Это был кайф. Она работает! Можно идти пить чай, смотреть карты, делать зарисовки - изображение по прежнему будет в окуляре. Конечно, небольшие смещения присутствуют, скорее всего из-за неточно установленной платформы и рассчитанной скорости, но для визуала - этого более чем достаточно, тем более при желании можно это скорректировать.
Выставил уровень. Ставлю движок на паузу в приложении с телефона, ловлю Луну в окуляр, нажимаю пуск - и картинка замирает!!! Это был кайф. Она работает! Можно идти пить чай, смотреть карты, делать зарисовки - изображение по прежнему будет в окуляре. Конечно, небольшие смещения присутствуют, скорее всего из-за неточно установленной платформы и рассчитанной скорости, но для визуала - этого более чем достаточно, тем более при желании можно это скорректировать.



первые успешные испытания
До оснастил платформу пузырьковым уровнем и концевиками. Теперь она сама переезжает в начало, когда доходит до крайнего положения (примерно раз в час).

Из недостатков:
Пока не нашел нормальных ножек, вместо них болты М8.
Писк шагового двигателя, он еле слышен, но сейчас привык и с ним даже прикольней.
В некоторые моменты казалось, что на максимальных увеличениях видно вибрацию, но надо еще раз перепроверять, возможно это была атмосфера. Если же это подтвердится, придется увеличивать коэффициент редукции для двигателя.
Но в целом - доволен результатом. Поездка в САО без платформы лишний раз убедила, что для меня это необходимая вещь.
Так что если ваш телефон вдруг обнаружит в поле сеть EQPLATFORM, прислушайтесь, возможно где-то рядом пищит шаговый двигатель, пытаясь остановить Землю ![]()
11 комментариев
Создайте аккаунт или войдите для комментирования
Вы должны быть пользователем, чтобы оставить комментарий
Создать аккаунт
Зарегистрируйтесь для получения аккаунта. Это просто!
Зарегистрировать аккаунт
Войти
Уже зарегистрированы? Войдите здесь.
Войти сейчас